Cuando una corriente circula por
un conductor embobinado con N vueltas, produce un flujo magnético f, el cual forma trayectorias
cerradas.
Entonces si hay N vueltas y el flujo f pasa a
través de cada vuelta el flujo concatenado
total (enlace de flujo) está dado por la expresión:
l=Nf
Inductancia Magnética:
Las corrientes y fem se induce en un
circuito cundo el flujo magnético
a través del área encerrada por el circuito cambia con el tiempo. Esta inducción electromagnética tiene algunas consecuencias prácticas, las
cuales describiremos a continuación. En
primer lugar se describe un efecto
conocido como autoinducción, en el cual una corriente que varía
en el tiempo en un circuito
produce en este una fem inducida que se opone
a la fem que al inicio
establece la corriente que varía con el tiempo. La auto inducción es la base del inductor un elemento eléctrico que desempeña
un importante papel
en circuitos que utilizan corrientes que batían con el tiempo. Se analiza
la energía almacenada en un campo magnético de un inductor y la densidad de la energía asociada con el campo magnético. Después
se estudia cómo se induce una fem
en un circuito como resultado de
un flujo magnético variable producido por un circuito: este es el principio básico de la
inducción mutua. Se
examinaran las características de los circuitos que
contienen inductores, resistores
y capacitores en diversas combinaciones.

Esta imagen nos ayudara a entender cómo
se representa en un matriz la interacción de las inductancias dentro de la máquina.
Todas estas inductancias y sus interacciones unas con otras son las que
provocan, en parte, el funcionamiento de la maquina síncrona. Estas
inductancias trabajan entre sí por medio de los enlaces concatenados.

El enlace concatenado es aquel
que une lo eléctrico con lo magnético y se representa con esta ecuación;
Como podemos observar esta es la forma matricial
de una maquina síncrona. Ya que estamos combinando el motor de corriente
directa y el motor de corriente alterna.
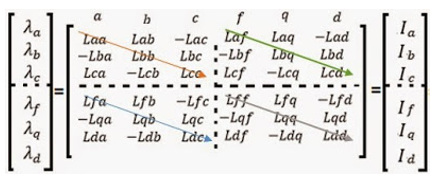
Podemos
observar signos negativos, esto quiere dar a entender que el recorrido o la
posición van en sentido contrario, es decir que está en dirección de las
manecillas del reloj.

Esta es la matriz que representa
las auto inductancias marcadas con una flecha naranja y gris, que son las
diagonales tomando como principales a: Laa, Lbb, Lcc y Lff, Lqq, Ldd por
representar a él estator y el rotor respectivamente, y en los otros dos
cuadrantes, marcadas con flechas azul y verde, se encuentran las inductancias
mutuas que representan la parte capacitiva e inductiva respectivamente de la
máquina.
Esta parte nos indica la forma
matricial del motor de corriente alterna, podemos darnos de esto, porque
tenemos tres fases (a, b y c). Los
elementos de la diagonal son las auto inductancias y los demás, los que no están
en diagonal son las inductancias mutuas.

Esta es la parte del motor de
corriente directa. Podemos observar los ejes,
el de cuadratura (f) el eje directo (q) y el de campo (d).
También cómo podemos observar en
las tres fases a.b y c están conectadas las inductancias de campo de cuadratura
y directa. Los elementos diagonales son los que representan las
auto-inductancias y los demás son las
inductancias mutuas.

El estudio del comportamiento de las
máquinas sincrónicas se simplifica al considerar dos ejes ficticios denominados
eje directo y eje en cuadratura, que giran solidarios al rotor a la velocidad
de sincronismo: El eje directo es aquel
que se define en la dirección Norte-Sur del rotor, con su origen en el centro
magnético y en dirección hacia el Norte.
El eje en cuadratura tiene el mismo origen que el anterior pero su
dirección es perpendicular a éste. Las corrientes por ambos enrollados
ficticios (Id e Iq) están desfasadas en 90º eléctricos y la suma de ambas es
equivalente a la corriente por fase en los enrollados reales. N S
El uso de estos enrollados ficticios permite simplificar el análisis de las máquinas sincrónicas. En particular, en el caso de la máquina con rotor cilíndrico que posee una geometría simétrica es posible establecer un circuito eléctrico equivalente para definir el comportamiento de esta máquina. En el caso del rotor de polos salientes, si bien no se puede esquematizar el comportamiento de la máquina a través de un circuito eléctrico equivalente, el empleo de los ejes directo y en cuadratura contribuye a simplificar notablemente el desarrollo analítico y las ecuaciones debido a que permite independizarse del ángulo de posición entre el rotor y los ejes de las fases.
El uso de estos enrollados ficticios permite simplificar el análisis de las máquinas sincrónicas. En particular, en el caso de la máquina con rotor cilíndrico que posee una geometría simétrica es posible establecer un circuito eléctrico equivalente para definir el comportamiento de esta máquina. En el caso del rotor de polos salientes, si bien no se puede esquematizar el comportamiento de la máquina a través de un circuito eléctrico equivalente, el empleo de los ejes directo y en cuadratura contribuye a simplificar notablemente el desarrollo analítico y las ecuaciones debido a que permite independizarse del ángulo de posición entre el rotor y los ejes de las fases.
Presentamos ahora nuestra matriz para un motor de corriente continua, conectado en paralelo, sin carga.
Empezando por el desarrollo matemático de nuestra matriz:

La primera matriz nos muestra el voltaje, la de en medio nos muestra las inductancias, y la tercera nos muestra la corriente, todos estos valores fueron tomados de la prueba sin carga y conectado en paralelo.
Proseguimos a ejecutar un procedimiento matemático sencillo, para poder calcular nuestras inductancias:



Procedemos a multiplicar nuestras matrices, las de inductancias por las correspondientes de corrientes, para así obtener lo siguiente:



Vemos que ahora, tenemos un procedimiento mucho más sencillo para calcular nuestra matriz de inductancias por lo que ahora simplemente procedemos a despejar las ecuaciones y a obtener el valor de cada literal, para registrarlo todo en nuestra matriz completa:








de que libro sacaste ese diagrama y la matriz? gracias
ResponderEliminar